Копирующие манипуляторы
мои старые разработки от 1994 года.
В 90-тых гадах приведенная ниже информация по ряду причин не вошла в описание патента № 2134193 ru (прежде всего по причине объёма).
Однако теперь, для решения проблемы «Робастность манипуляторов антропоморфного робота-аватара, управляемого в копирующем режиме», пришлось вытащить из архива эти свои очень древние
наработки, т.к. мне надо на что-то ссылаться в своих новых разработках.
У приведенного ниже текста немного корявый стиль, но я уже не стал его сильно исправлять
– просто перепечатал. Чертежи тоже не стал переделывать – отсканировал то, что есть с бумажных носителей. Не судите, пожалуйста, меня очень строго – ведь
это был мой первый опыт в робототехнике.
* * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * *
Манипуляторы по внешнему виду и функциям похожи на руки человека.
Внутреннее строение манипуляторов такое: жесткие, подвижные относительно друг друга элементы – «кости». На «костях» закреплены «мышцы» - гидравлические цилиндры. Гидроцилиндры имеют герметичное уплотнение у штока, это позволяет каждой (одной) «мышце» либо укорачиваться (тянуть), либо удлиняться (толкать) детали суставов, тем самым сгибать и разгибать сустав.
Для дистанционного управления этими манипуляторами на руки человека-оператора надевают управляющий рукав с пятипалой перчатками. Эти рукава и перчатки состоят из подвижно сочлененных между собой жестких элементов.
Рукава и перчатки выполняют роль механизмов, управляющих манипуляторами, поэтому назовём их управляющим механизмом, а жесткие элементы, из которых они состоят, - рычагами управления или просто рычагами.
В каждом подвижном сочленении управляющего механизма и в каждом «суставе» манипулятора вмонтированы по два датчика угловых перемещений.
Каждая «кость» или каждый датчик строго взаимно однозначно соответствуют одному рычагу или одному датчику управляющего механизма. Назовём такое соответствие «сопряжением».
Здесь далее я опишу только один «сустав» манипулятора и сопряженное ему подвижное сочленение управляющего механизма.
Все остальные «суставы» манипулятора и все остальные сочленения управляющего механизма имеют принципиально такое же устройство. (Под принципиальной одинаковостью здесь подразумевается методы крепления «мышц» и способы снятия показаний датчиками).
· Принципиальная схема крепления «мышц» - гидроцилиндров:

Прежде всего – ось № 1. Вокруг этой оси и будет в дальнейшем происходить вращение «костей» № 2 и № 3 – сгибание и разгибание сустава. На рисунке между костями 2 и 3 находится деталь № 4 (точечная штриховка). К этой детали № 4 крепится через ось № 5 шток № 6 гидравлического цилиндра № 7. Через деталь № 4 и упругий заполнитель № 8 усилие от «мышцы» № 7 передаётся на «кость» № 3. (В качестве упругого заполнителя можно использовать резиновую прокладку).
В «кость» № 2 возле оси № 1 вмонтирован датчик угловых перемещений, он измеряет угол между костями № 2 и № 3 (на приведенной схеме он не показан).
· Описание и схема, поясняющая принцип снятия показаний датчиками угловых перемещений.
Особо подчеркну то, что деталь № 4 не связана жестко с «костью» № 3, а может совершать относительно неё небольшие движения (вращения на оси № 1) и что между деталью № 4 и «костью» № 3 имеется упругий заполнитель № 8.
Мы можем измерять внешние силы, прилагаемые к кости № 3 используя в конструкции сустава еще один датчик угловых перемещений, измеряющий углы между «костью» № 3 и деталью № 4.
Так, если через «кости» № 2, № 3 и деталь № 4, в состоянии, когда на «кость» № 3 не действуют внешние силы, провести прямые линии, то получим:

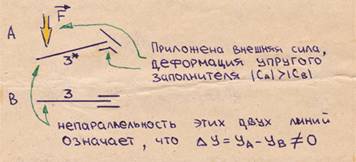
Теперь приложим к «кости» № 3 внешнюю силу F. Под действием этой силы деформируется упругий заполнитель № 8 и изменяются углы между прямыми линиями:

Измерение углов между «костью» № 3 и деталью № 4 позволяет судить о внешней силе F.
(Угол между «костями» № 2 и № 3 не определяет прилагаемой внешней силы. Это можно продемонстрировать таким примером:
Пусть на «кость» № 3 действует сила F, «мышца» № 7 развивает силу F’ и поддерживает между «костями» № 2 и № 3 постоянный угол в 1800 (как и в первом случае, когда на «кость» № 3 не действовало никакой силы).
Однако, угол между «костью» № 3 и деталью № 4 отличается от 900 (равен 900 + a) – это и позволяет судить о приложенной внешней силе.

Итак, после того, как мы ознакомились с принципом крепления «мышц» и методами снятия показаний датчиками, можно перейти к рассмотрению сопряженных элементов: подвижному сочленению на управляющем механизме и соответствующему ему «суставу» на манипуляторе.
· Принципиальная схема сопряженных элементов:

На приведенной схеме подвижное соление управляющего механизма и соответствующий ему «сустав» манипулятора имеют одинаковое изображение:

(одинаковое из-за принципиально схожести строения).
Буквами “А” обозначен механизм управления, буквами “В” – манипулятор.
«Мышцы»-гидроцилиндры на схеме изображены так:

Электроклапаны, через которые происходит нагнетание в цилиндры рабочего вещества, обозначаются: А1, В1, А2, В2.
Клапаны А1 и В1 впускают рабочее вещество в левую (от поршня) часть цилиндра, одновременно с включением клапанов А1 и/или В1 происходит открывание клапанов, выпускающих рабочее вещество из правой (от поршня) части цилиндра. На схеме клапаны выпуска не показаны, а изображены только клапаны, через которое происходит нагнетание рабочего вещества.
Аналогичную ситуацию имеем для клапанов А2 и В2.
Измерения датчиков угловых перемещений от управляющего механизма и сопряженного ему «сустава» манипулятора поступают в процессор по каналам УА, СА — УВ и СВ.
Где: УА – угол между рычагами управляющего механизма;
УВ – угол между «костями» сустава манипулятора
СА и СВ – углы, характеризующие внешние силы.
Параметры УА, УВ, СА и СВ анализируются процессором и в зависимости от их значения клапаны А1, А2, В1, В2 получают по каналам связи команды – на схеме команды обозначены толстыми стрелками с зелёным контуром:


Четырёх параметров УА, СА, УВ, СВ достаточно для обеспечения работы двух сопряженных элементов – «сустава» манипулятора и соответствующего ему подвижного сочленения управляющего механизма.
Ниже приводится алгоритм, по которому работает процессор, и его описание. Этот алгоритм может быть переведен на Любой язык программирования, либо его можно «запечатать» в микросхему. (Микросхемой с «запечатанным» в неё алгоритмом пользоваться удобней, т.к. не надо будет каждый раз перед началом работы манипулятора «насыщать» его процессоры программным обеспечением).
Прежде чем рассматривать алгоритм, необходимо договориться о направлении отсчета углов: будем считать углы УА и УВ положительными, если они отмеряются против часовой стрелки:

Как ранее отмечалось, углы СА и СВ характеризуют внешние силы. Они отмеряются угловым смещением относительно «кости» (или рычага), к которой приложена внешняя сила.
Будем считать углы СА и СВ положительными, если они отмеряются по часовой стрелке. Пример: пусть внешняя сила равна нулю, тогда угол между осями, проведёнными через детали № 3 и № 4, равен 900 при этом полагаем, что СА = 0:

Теперь приложим силу F так, что бы «кость» (или рычаг) № 3 сместилась против часовой стрелки (в положительном направлении отсчета углов УА или УВ).
Тогда относительно детали № 3 деталь № 4 будет смещена по часовой стрелке — имеем положительный угол СА или СВ:

Теперь можно перейти к рассмотрению алгоритма и его описанию – каждый раз, после того, как алгоритм отдает клапанам «мышц» определенные команды:

, приводится схематический рисунок ситуации:
, предшествовавший моменту отдачи команды, и поясняющий её (команды) необходимость.


На обороте предыдущего изображения:

Выше я уже указывал, что это мои разработки из 1994 года. Тогда я как-то пытался защитить свои идеи. Для этого использовал заверение рукописи у нотариуса. Вот эстонский нотариус Хельга Рейго 16 сентября 1994 года поставила свою печать.J

В алгоритме после ввода данных УА, УВ, СА, СВ (операция 1) и вычисления величин ΔУ = УА - УВ, |СА|, |СВ| и |ΔУ| (операция 2) предусмотрено два варианта:
«Перегрузка» (операция сравнения № 3) или «Рабочий режим» |СВ| ≤ 40 (операция сравнения № 4).
Примечания: 1.
1. Здесь 40 “взяты с потолка” – просто надо было ввести какую-то небольшую величину.
2. Далее везде вместо слов «операция №», «команда №» будут просто указываться номера в скобках.
В случае перегрузки |СВ| > 40 (3) на данный сустав манипулятора действует слишком большая сила, способная вывести его из строя. Чтобы этого избежать, включается защитный механизм – манипулятор поддается действию внешней силы включением соответствующих клапанов и элементы сустава движутся в сторону действия силы: (1,2,3,5,6) или (1,2,3,7, 8). Соответствующие рычаги управляющего механизма движутся в том же направлении.
Примечание:
Здесь можно провести аналогию: если у человека в руках окажется слишком тяжелый груз (например 1 тонна), то наши руки сами опустятся под действие веса этого груза помимо нашей воли.
Рабочий режим сустава манипулятора: |СВ| ≤ 40 (4). В этом случае имеет две возможности УА ≠ УВ (9) и УА = УВ (10).
Рассмотрим возможность неравенства углов в суставе манипулятора и сопряженном ему суставе управляющего механизма: УА ≠ УВ или ΔУ ≠ 0. Здесь различаются два случая: «разрешенный режим» - когда |ΔУ| ≤ 20 (11) и «запрещенный режим» - когда |ΔУ| > 20 (12).
Рассмотрим «разрешенный режим» - |ΔУ| ≤ 20 в этом случае углы в суставе манипулятора и в сопряженном ему суставе механизма управления различаются меньше чем на 20.
При этом режиме имеются три возможности: «приоритет оператора» - |СА| > |СВ| (13), «приоритет манипулятора» - |СВ| > |СА| (14) и «равенство внешних сил» - |СА| = |СВ| (15).
Возможность: «приоритет оператора» - |СА| > |СВ| (13) возникает когда человек-оператор сгибает сустав механизма управления: ΔУ ≠ 0, и если при этом его усилия больше внешней силы, действующий на соответствующий узел манипулятора, то механизм управления и манипулятор будут сгибаться в одну и туже сторону.
Возможность: «приоритет манипулятора» - внешняя сила, действующая на манипулятор, больше силы оказываемой человеком-оператором на сопряженный сустав механизма управления: |СВ| > |СА| (14), сустав манипулятора и сопряженный сустав механизма управления движутся одновременно в одну сторону в направлении силы действующей на манипулятор.
Пример: Если манипулятором захвачен какой-то увесистый груз, так что |СВ| > |СА|, то под действием этого груза происходит опускание (одновременное) манипулятора и управляющего механизма. Чтобы остановить это опускание, человеку-оператору необходимо будет приложить большее усилие сделать соотношение |СВ| ≤ |СА|.
Возможность: «равенство внешних сил» |СА| = |СВ| (15). Здесь процессор в основном отдаёт команды минимизирующие |ΔУ|: (lim |ΔУ| → 0).
В случае «запрещенный режим» |ΔУ| > 20 (12) углы в суставе манипулятора и в сопряженном ему суставе управляющего механизма по какой-то причине сильно различаются |ΔУ| > 20. Процессор отдаёт команды на уменьшение разницы углов, независимо от направления внешних сил, действующих на манипулятор и управляющий механизм. Этот же «запрещенный режим» используется, если человек-оператор «зарвётся» и слишком сильно изменит разницу углов
ΔУ = УА - У
Примечание:
Здесь 20 «взяты с потолка» - надо было указать в алгоритме какое-то числовое значение.
Теперь рассмотрим случай УА = УВ (10). Здесь имеются такие три возможности: |СА| > |СВ| (18), |СА| = |СВ| (19) и |СA| < |СB| (20). При УА = УВ (10) и |СА| > |СВ| (18) или УА = УВ (10) и |СA| < |СB| (20) процессор отдаёт «мышцам» такие команды, что в конце концов приводит систему к такому виду: УА = УВ (10) и |СА| = |СВ| (19) и СА = СВ (21). Можно сказать, что условия: УА = УВ (10) и |СА| = |СВ| (19) и СА = СВ (21) и СА= 0 (22) – конечная цель алгоритма (крайне неустойчивое положение равновесия), и процессор отдает команды «мышцам» только в том случае, если эта система математических неравенств нарушена.
«Ветви ощущений» (23) и (24) возникают когда внешние силы, действующие на манипулятор и сопряженный ему сустав механизма управления равны по абсолютному значению |СА| = |СВ| и противоположны по направлению: СА ≠ СВ и Δ
У = 0, т.е. УА = УВ (10). — Человек-оператор давит на управляющий механизм с силой СА, но и управляющий механизм в свою очередь сопротивляется оператору с силой |СА|, за счёт этого противодействия человек-оператор и ощущает внешнюю силу |СВ|, действующую на сустав манипулятора.
Как видите в приведенном алгоритме используются обратные связи (УА, СА) и (УВ, СВ). Использование обратной связи (УВ, СВ) даёт возможность человеку-оператору ощущать (даже в мутной воде, при нулевой видимости) расположение различных предметов, их форму и вес.
* * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * *
Послесловие:
Выше я уже указывал, что алгоритм (граф) можно "упаковать" в стандартную интегральную логическую схему (дешифратор), которая при подаче на её входы n - разрядного двоичного кода переводит один из своих 2n выходов в состояние логической единицы. Вот пример такого дешифратора из книги "Микропроцессоры", авторы: А.В. Шилейко, Т.И. Шилейко, Москва, 1986 год:

Потом можно применить логические элементы "ИЛИ" - в результате получим 4 выхода для подачи команд на клапаны "мышц"...